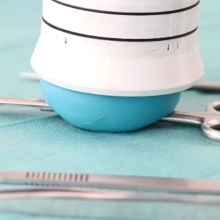
The robotic gripper is moving smoothly over a sterile set of instruments that includes scalpels, forceps, and clamps. Two gripper arms are circling over the tools to move into position. A half-round, turquoise-colored hemisphere is standing out at the end of each gripper arm. These are the grippers that enable the robot to securely hold any instrument – similar to the surgical nurse, also called the scrub nurse.

What is a Robotic Scrub Nurse?
The turquoise-colored grippers are the core of the Robotic Scrub Nurse. Jolanda Friedrich, a student of Medical Engineering at the University of Stuttgart and the University of Tübingen, is concerned with this novel technology within the framework of her Bachelor’s thesis. “The idea is that the Robotic Scrub Nurse can assist a surgical nurse in passing instruments and material in the OR,” says the recent graduate.
Together with her supervisor Max Schäfer, a doctoral degree student at the Institute of Medical Device Technology (IMT), and Prof. Peter Pott, Head of the IMT, Friedrich developed a technology that makes the Robotic Scrub Nurse a viable assistance system in the operating room. “Robotic assistance systems could perform subtasks in standard surgical interventions and thus would be able to compensate for the shortage of trained assistants,” says Pott. “In view of the shortage of skilled professionals, it makes sense to increasingly use robots in hospitals in the future in order to relieve staff, who can then be assigned other tasks.”
Using the gripper technology to create new fields of application
“My task was to determine what the gripper should be able to do and what will be required for this,” says Friedrich. “The focus of my work was on designing the gripper in such a way that it is able to grasp an object, take it to the location where the object is to be placed, and, once there, put it down again.”
According to Friedrich, a universal jamming gripper is the best choice for this purpose. This gripper consists of a bag with granular material that, as soon as it is placed on an object with light pressure, partially encloses it and thus adapts to its shape. To achieve this, there must be a vacuum in the bag. “Think of it like vacuum-packed coffee,” Friedrich explains. “When the bag is sealed, the coffee powder is hard. As soon as you open the bag, the air gets in and the powder becomes soft. This is exactly what happens when gripping, just in reverse.” The advantages of this gripping technology are obvious: it is inexpensive, hygienic, and can be applied to any type of material and shape.

Years of research are still needed for use under real conditions
Although the scrub nurse robot has been acting only on manual command so far, the gripper is equipped with the necessary technical features that will allow it to act independently one day. “At the institute, we are working on camera-based object recognition,” says Schäfer, who is concerned with robotic assistance in the OR within the framework of his doctoral degree studies. This is an imaging system that can recognize what is in front of it and where it is by means of a camera on the gripper arm. “In addition, the Robotic Scrub Nurse is intended to be able to interact with the surgeon through voice or gesture control.”
The Robotic Scrub Nurse will probably not replace a surgical nurse for the time being. “This isn’t the idea anyway,” Schäfer emphasizes. “The varied tasks of a surgical nurse can hardly be covered by a single technical system. It’s rather about assistance in the OR. For example, a technical system doesn’t know the individual preferences of the surgeon. At the moment, we are working on automated situation and process recognition, for example to identify upcoming work steps - but there’s still a lot to do here.”
{kind=link}
Young researchers in the field of medical engineering are developing the technology of tomorrow
“We’re teaching the students how to solve problems,” says Pott. This includes methodical approaches, a broad basic technical knowledge, and project management. “I like to see when students want to do something practical, and I enjoy watching them grow from this.”
At both locations, Stuttgart and Tübingen, the students benefit from an excellent technical education as well as a medical education. “The study programs on medical engineering at the University of Stuttgart and the University of Tübingen are characterized by the free choice of specialization modules,” says Pott. In the first four semesters, students acquire the basics. After that, they can choose their individual area of specialization from a variety of technical and medical lectures. In addition to professional activities in research and development, the fields of quality assurance, marketing and sales as well as medical device consulting and regulatory affairs are open to the graduates.
After completing her degree, Friedrich wants to travel for a few months before starting her Master’s degree studies. “Developing the gripper has sparked my interest in automation technology,” says Friedrich. “I’d find it exciting to learn more about this in a Master’s degree program.”