
Per Flugtaxi von der City an den Airport: Seit der Flughafenbetreiber Fraport und das Startup Volocopter aus Bruchsal die Integration autonomer Flugtaxis in den Betrieb am Frankfurter Flughafen prüfen, ist das keine Fiktion mehr. Für die Sicherheit und Zuverlässigkeit der neuen Fluggeräte sorgt eine Steuerungs-Software, deren Algorithmen in einer Kooperation mit dem Institut für Flugmechanik und Flugregelung der Universität Stuttgart entwickelt wurden.
Volocopter sind emissionsfreie, von 18 Elektromotoren angetriebene Multikopter, die senkrecht starten und landen können. Sie basieren auf der Drohnentechnologie und können zwei Menschen knapp 30 km weit fliegen - emissionsfrei und geräuscharm. Da ihr Bedarf an physischer Infrastruktur, zum Beispiel Verkehrsflächen, gering ist, sind Multikopter sehr flexibel einsetzbar. Daher gelten sie als vielversprechende Lösung, um einen Teil des steigenden Transportbedarfs in Ballungsräumen zu decken und Engpässe bei der Verkehrsinfrastruktur abzumildern.
Anders als Flugzeuge, die sich über die Aerodynamik von Flügeln und Leitwerk stabilisieren, werden Multikopter über die Drehmomente der einzelnen Propeller stabilsiert. Dies funktioniert nicht mechanisch, sondern durch ein Flugregelungssystem, das sich die notwendigen Informationen aus verschiedenen, vielfach verbauten Sensoren zieht. Im Bereich der unbemannten Drohnen gibt es solche Systeme bereits. Sie lassen sich jedoch nur bedingt auf bemannte Multikopter übertragen, denn ein Ausfall des Systems könnte hier fatale Folgen haben. Deshalb sind die Anforderungen an Zuverlässigkeit und Sicherheit besonders hoch. Gleichzeitig sind die Leistungsreserven bemannter Multikopter aufgrund der großen Nutzlast wesentlich geringer als bei üblichen Drohnen.
Überdies stellt der bemannte Flug zusätzliche Anforderungen an Handling und Komfort. All diese Herausforderungen machen geeignete Algorithmen der Flugsteuerung und Regelung, wie sie in der Kooperation zwischen Volocopter und dem Institut für Flugmechanik und Flugregelung der Universität Stuttgart entwickelt werden, zu einem Schlüsselaspekt für die Realisierung von Flugtaxis.
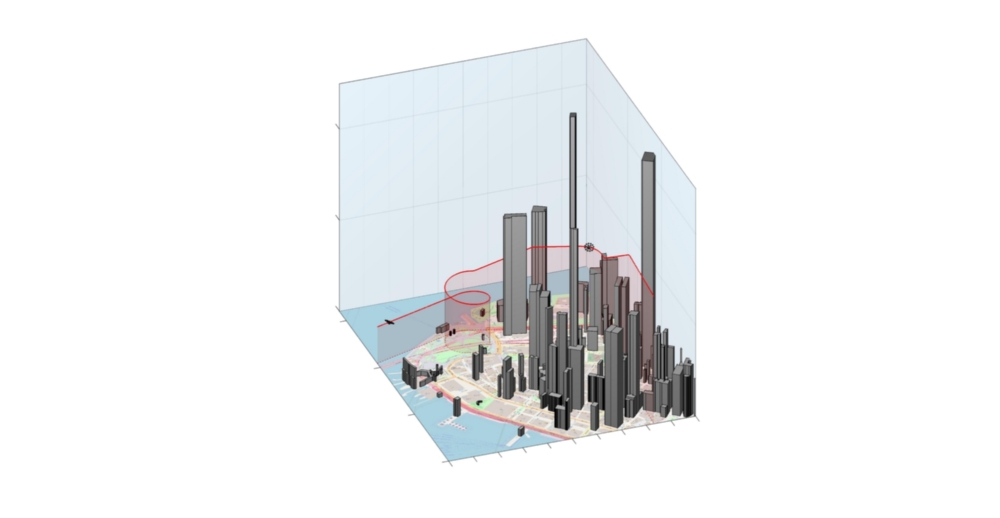
Wie kommt der Volocopter durch die Hochhäuser?
Für die Flugregelung entwickelt Volocopter ein eigenes Flugsteuerungssystem, das sowohl Hardware- als auch Software- Komponenten umfasst. Es deckt den kompletten Funktionsumfang von der Bahnplanung bis zur Ansteuerung der Motoren ab. In letzterem Fall erzeugt eine Planungssoftware aus diesen Wegpunkten dreidimensionale Flugbahnen beziehungsweise vierdimensionale Trajektorien. Diese halten die physikalischen Grenzen des Flugzeuges ein. So lassen sich komplexe Flugbewegungen in urbaner Umgebung in einer allgemeingültigen Darstellung realisieren und die Bahnen sind fliegbar.
Aufgrund der hohen Sicherheitsanforderungen bemannter Multikopter ist das Flugsteuerungssystem mehrfach redundant ausgelegt. Alle in diesem Zusammenhang von der Universität Stuttgart entwickelten Algorithmen besitzen ein deterministisches Verhalten und garantieren eine begrenzte Rechenzeit.
Ausgehend von den bestehenden Algorithmen bildet das Flugsteuerungssystem eine Basis, um in Zukunft autonomes Fliegen in urbaner Umgebung zu ermöglichen. Im nächsten Schritt soll das System um Methoden für die Erkennung von statischen und bewegten Hindernissen erweitert werden, damit der Volocopter diese umfliegen kann. Derzeit wird die Flugsteuerungssoftware für den Einsatz in der bemannten Luftfahrt zertifiziert und auf dem Volocopter 2X intensiv erprobt. Die Daten der ersten Tests zeigen, dass das System den Pilotenkommandos sehr gut folgt, was die Grundlage für den sicheren Betrieb des Systems als elektrisches Lufttaxi schafft.
Fachlicher Kontakt:
Prof. Walter Fichter, Universität Stuttgart, Institut für Flugmechanik und Flugregelung,
Tel. +49 (0)711 685-67060, E-Mail